
MiniBEE 👌🐝: Towards a Miniature Bimanual End-Effector for Compact Coordinated Robot Dexterity
Minibee Design

Manipulation Tasks
Conducted in the ROAM Lab, MiniBEE is a bi-manual end-effector composed of two small robotic arms—each equipped with a gripper—mounted onto a larger industrial arm to enable mobile dexterous manipulation within an extended workspace. MiniBEE features:
- A novel 8-DOF robot arm design with two end-effector, which enables dexterous bimanual manipulation and can be mounted on a larger industrial robot arm
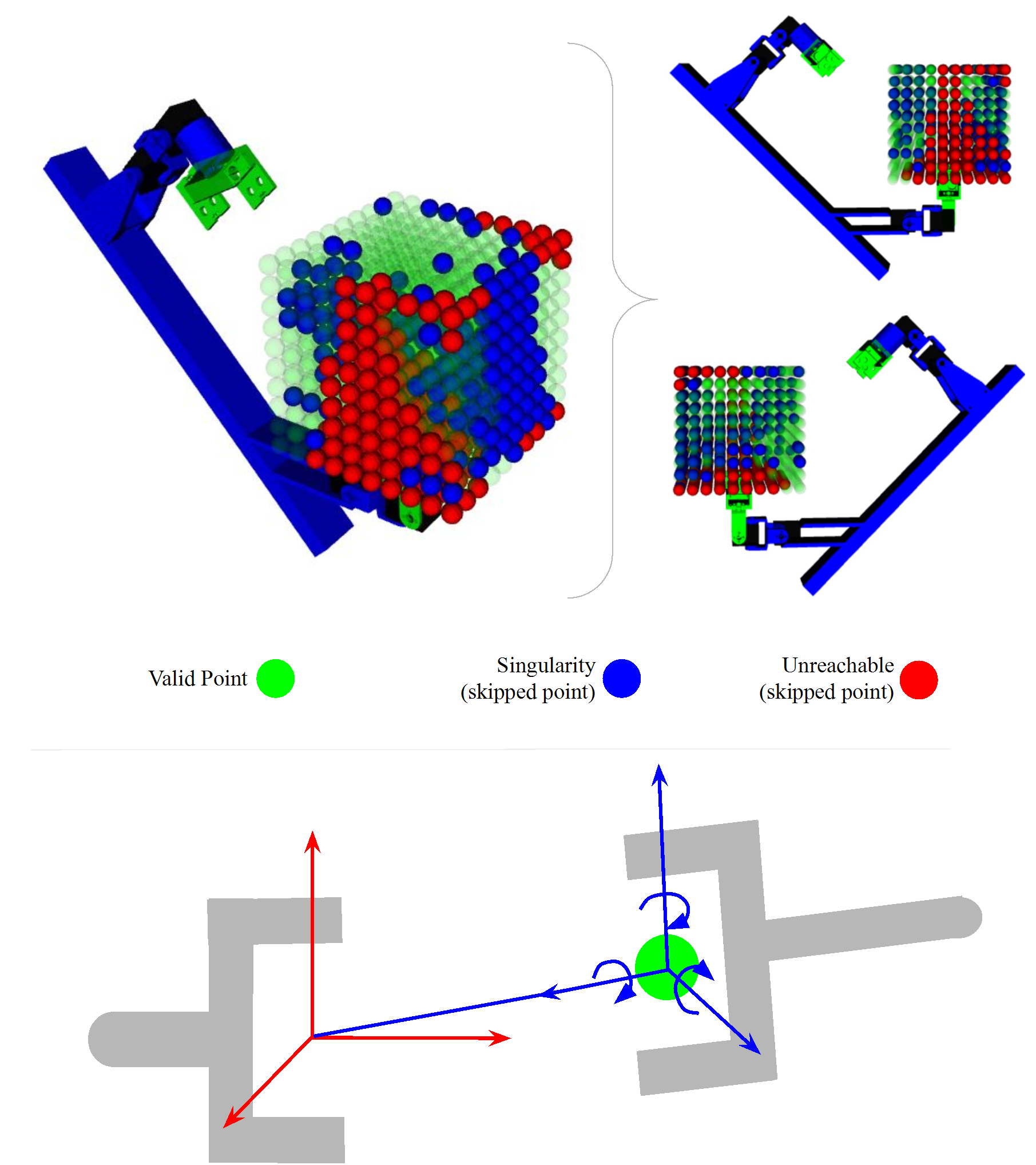
- Workspace analysis tools for evaluating dexterous manipulation under different kinematic designs
- Kinematic control algorithms, including null-space control and sample-based singularity avoidance
- A multifunctional interactive graphical interface supporting individual joint position control, Cartesian velocity control, motor torque enable/disable, trigger-to-gripper mapping, camera preview, etc.
- A customized wearable back brace for mounting MiniBEE and collecting data in diverse environments
- A demonstration collection and replay pipeline using puppeteering manipulation
- Automatic policy learning for multiple dexterous manipulation tasks using Diffusion Policy
This project was exhibited at MIT NEMS 2025 with a poster and live demo, and our manuscript MiniBEE: A New Form Factor for Compact Bimanual Dexterity has been submitted to ICRA 2026, in which I am a co-first author.
My contributions include:
- Hardware improvement and assembly
- Development of kinematic control algorithms
- Design of the interactive graphical user interface
- Construction of the data collection pipeline
- Training and fine-tuning the Diffusion Policy for multiple dexterous manipulation tasks
- Collaboration in preparing the manuscript and supplemental videos
After ICRA 2026 submission, starting form October 2025, we are now focus on improving MiniBEE from following aspects:
- Residual RL for compensating the steady-state error in the motor command, reducing the gap between puppeteering and replay
- Speeding up the BC policy using RL
- Analysis of the “Continuous” Dexterous Workspace of different kinematic designs
- Environmental-related policy for closed-loop pick up and placement