
Computer Vision Based Fruit Sorting Robot
System Architecture 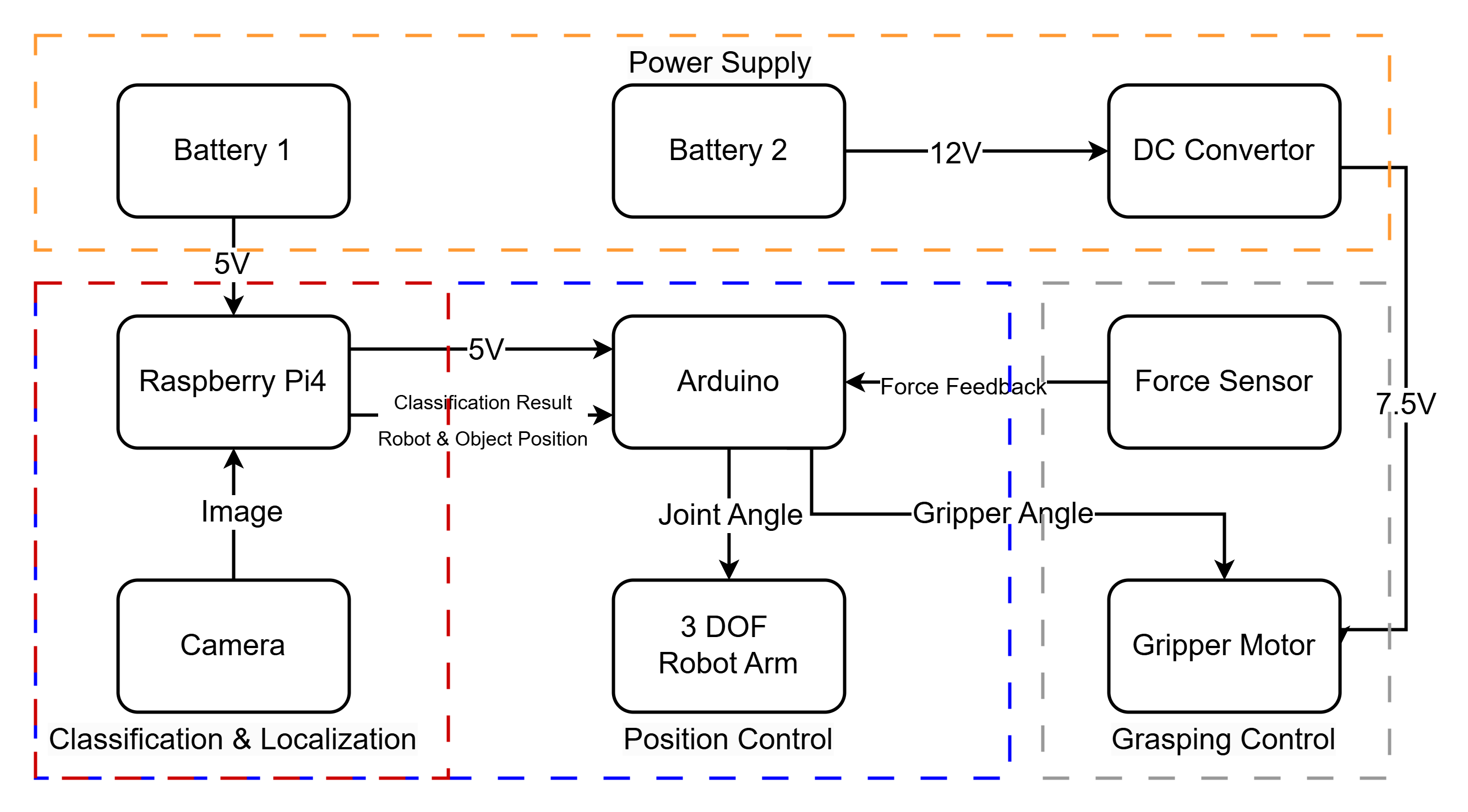
This research was an undergraduate group project conducted at Zhejiang University under the supervision of Professor Yiping Feng (Control Science, Zhejiang University). The project achieved non-destructive picking of various small fruits using a 3-DOF open-source robotic arm, featuring:
- A customized gripper with a force-resistive thin-film pressure sensor
- An Arduino–Raspberry Pi integrated control system for the robotic arm and gripper
- Global localization of the end-effector using AprilTag
- Fruit classification and detection using MobileNetV3 + SSD
- Non-destructive fruit picking enabled by PD control
As the team leader, my contributions included:
- Assembling the hardware
- Developing communication between the robotic arm, Arduino, and Raspberry Pi
- Collecting data for model training
- Organizing weekly discussions and writing progress reports to ensure timely project progress